Three reasons why Ethernet is used for motion control
For motion control, Ethernet, fieldbuses, and other technologies such as peripheral component interconnects have historically competed for access to some of the most demanding workloads in industrial automation and control systems. Motion control applications require determinism (the assurance that the network will deliver the workload to the intended node in a timely manner), which is necessary to ensure position hold, which in turn will ensure precise stopping of drives, proper acceleration/deceleration, and other tasks.
Standard IEEE 802.3 Ethernet has never met this requirement. Even though full-duplex switching and isolated conflict domains eliminated the obsolete CSMA/CD data link layer, it still lacked predictability. In addition, the high complexity of TCP/IP in a typical stack is not optimized for reliable delivery of real-time traffic. Therefore, fieldbuses and PC control architectures with ASIC-based PCI cards have been the common motion control solution.
Ethernet solutions from EtherNet/IP® to EtherCAT® overcome these disadvantages in their own unique way. Although Industrial Ethernet has some other advantages over alternative technologies, it is still far from dominating motion control. Let’s look at three reasons why it can and will be increasingly accepted in the coming years.
Convergence rather than increased complexity
Over time, the increasing interconnection between enterprise IT and plant has led to more complex systems, often mixing standard Ethernet and Industrial Ethernet with fieldbuses. For example, machines may utilize.
SERCOS 1 for communication with servers
PROFIBUS® for networking variable frequency drives
SafetyBUS p for fail-safe fieldbus communication
DeviceNet for connecting to sensors
Ethernet for sending data to end users, accessible via gateways
Such a network is complex, and it is also expensive to set up and maintain. Each protocol requires its own implementation procedures, installers and training. In contrast, Ethernet offers the possibility of converging disparate networks for motion, security, etc. onto a cost-effective infrastructure that is easier to wire, has broad vendor support, and can be adapted to future requirements.
Ethernet offers the possibility of converging disparate networks.
The EtherNet/IP protocol exemplifies how convergence can be fully exploited in practice. By using standard Ethernet technologies such as TCP/IP and UDP/IP, complemented by features such as CIP Sync (for distributed clock IEEE 1588 Precision Time Protocol synchronization), integrated switched systems can accommodate both commercial and industrial applications.
2
Determinism for motion control applications
Motion control relies on precise communication. This precision is supported by the use of time-slot-based scheduling, where each device has a scheduling table for communicating with other devices in a scheduling policy. These servo drives and controllers calculate their respective timing, from which the ΔT value of the control function can be calculated. However, if data transfers become unpredictable, results can be lost, so determinism is needed to ensure loop stability.
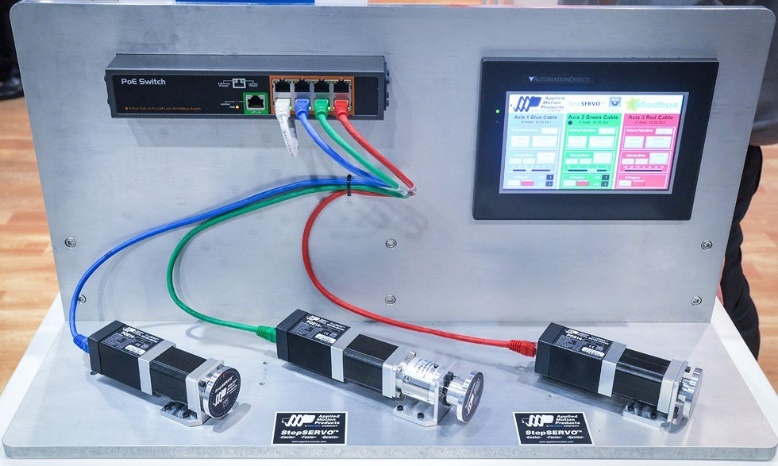
Ethernet can support demanding motion control applications in the factory
In some cases, the implementation of IEEE 1588 in EtherNet/IP via gas pedal circuitry integrated directly into the Intel® chip is just one common mechanism used by Ethernet solutions to enforce determinism. the high-speed real-time processing of EtherCAT is another example of how consistent predictive performance can be achieved in motion control applications. EtherCAT breaks through the The strict physical limitations of centralized PCI-based communication, which require that machine processing units and servo processors can communicate with each other quickly but need to keep the distance short.
In an article published in Machine Design 2010, Jason Goerges explains: “The distributed processor architecture based on EtherCAT offers the wide bandwidth, synchronization and physical flexibility to match the capabilities of centralized control with the benefits of a distributed network”. 3 “In fact, some processors with this approach can control up to 64 highly coordinated axes (including position, velocity and current loops as well as commutation) with sampling and update rates of 20 kHz.”
Long-term viability for the IIoT
Ethernet has undergone a series of developments since its introduction as a local area network technology. Given that legacy fieldbus components are now manufactured on a smaller scale and PCI is at risk of becoming an obsolete industry standard architecture, Ethernet has evolved and is now well positioned to serve the IP-centric Industrial Internet of Things.
Upcoming improvements (such as time-sensitive networks that will refine IEEE 1588 and support the possibility of network convergence) also make Ethernet ideal for current and future motion control. This is not to say that fieldbuses and PCI will die out, just that the benefits of Ethernet will continue to increase as the automation industry moves towards the IIoT.